


本文来源:每日侃车
将汽车实现无人驾驶汽车是为感知,决策和执行三个部分,其中最难的就是感知层面,就像是我们闭着眼睛,看不到周围的环境,所以无法走路。在汽车发展的一百年之,工程师通过各种努力来赋予汽车更好的执行能力,而感知和决策能力一直都是靠驾驶者来代替。实现无人驾驶汽车最大难点就是感知,其次是决策。今天,侃弟就给各位看官们介绍,无人驾驶汽车上的感知系统,还有目前的技术难点,到底什么时候能够实现无人驾驶。
第一:LKA(Lane Keeping Aid)车道保持辅助
顾名思义,车道保持系统就是辅助驾驶员保持车道,防止车辆没有打转向灯压线,要实现LKA车道保持辅助功能,主要的技术难点分为2个难点。一,车道线可靠识别(算法优化难);二,识别以后对车辆的连续控制(车辆动力学控制难度大)。

基于视觉感知的车道线识别系统只能通过算法的优化或者深度学习来更可靠的识别车道线,但不能达到100%车道线识别,连续平稳控制车辆也是技术难点,当视觉系统已经识别出车道线并且构建出3D模型的情况下,如何控制车辆在不逾越车道线的情况下还能保持动作的连续性和乘坐舒适性是国内大部分ADAS企业的一大难点,因为实现车辆的连续控制,对车辆的动力学方面有很高要求。
第二:BSD(Blind Spot Detection)盲区监测
客官们都知道,驾驶员通过车外后视镜和车内后视镜可以拓宽视野,但是不能达到100%感知外界环境,对于驾驶员看不见的地方,往往就是危险的存在,所以盲区监测就像是一双眼睛,帮助驾驶员时刻观察周围环境。
BSD预警标准和预警要求测试方法,要求对于车辆后方30m距离的接近车辆(行人)做出监测,对于速度分别是10m/s,15 m/s,20 m/s接近车辆(行人等),预警时间大于2.5秒,3.0秒,3.5秒。
一般通过集成在侧面和正后方的视觉传感器就可以达到测试标准,但视觉传感器对环境要求较高,如隧道口明暗变化、雨雪天气等,产生错报和漏报几率高,所以实现可靠的BSD最佳技术路线是视觉搭配雷达。
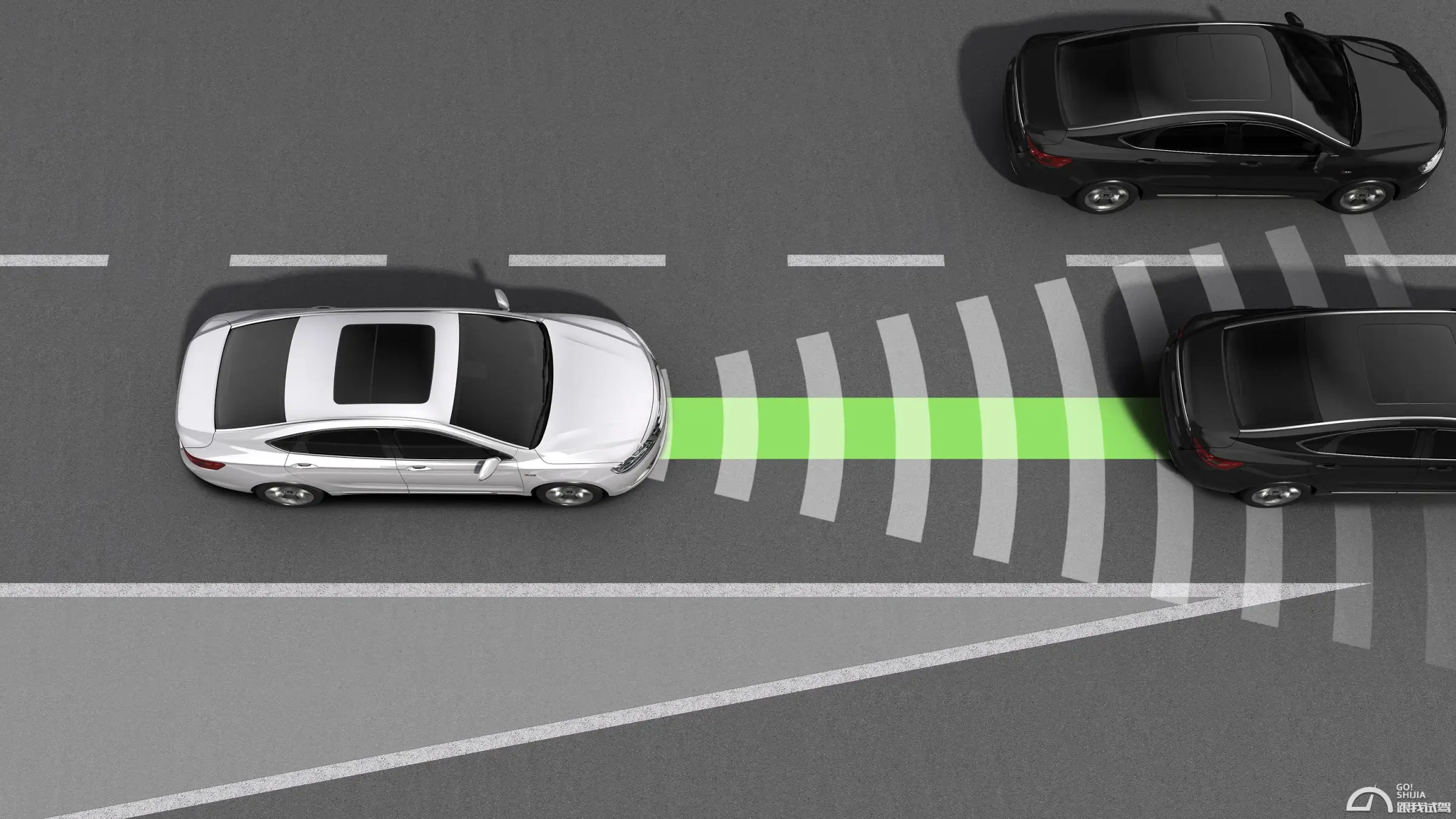
第三:FCW(Forward Collision Warning)前方碰撞预警系统
FCW是通过感知(摄像头融合雷达)与前车的距离,通过算法预算两车之间的想对行驶速度,当车辆的距离已经小于安全距离就会产生报警信号。
FCW感知系统只采用视觉摄像头(单目),对于少见,还未被收录的物体,其甄别能力几乎无效。对于暴雨、大雾、强光等恶略天气存在误报漏报情况,所以只采用单目摄像头的FCW实用性不高。
实现FCW的三种技术路径:
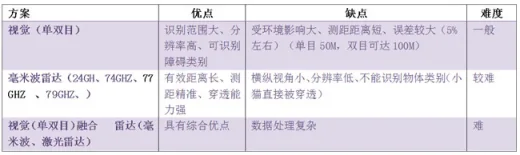
如果不考虑成本,用毫米波雷达可以吗?答案是行,没问题。但毫米波雷达优势在于恶略天气穿透性高,对金属反射性高,适用于长距离车辆检。而对生物体(小猫、小狗)却具有在穿透过性,存在漏检情况;
第四:自动紧急制动 Autonomous EmergencyBraking(AEB)
AEB是通过感知系统,测出与前车或者障碍物的距离,然后利用数据分析模块将测出的距离与警报距离、安全距离进行比较,小于警报距离时就进行警报提示,而小于安全距离时即使在驾驶员没有来得及踩制动踏板的情况下,AEB系统也会启动,使汽车自动制动,从而为安全出行保驾护航。

AEB与前面讲到的FCW在环境感知层面上存在着相同的技术难点。在控制层面由于乘用车多采用真空刹车助力或电子刹车助力,制动过程中其主要刹车力是由驾驶者施加,要实现AEB独立主动刹车,需要对传统的刹车结构做部分改进,这也是一大技术难点。
第五:ACC(Adaptive Cruise Control)自适应巡航
自适应巡航控制(ACC)是通过安装在车辆前方的感知系统检测在本车前进道路上是否存在速度更慢的车辆。若存在速度更慢的车辆,ACC系统会降低车速并控制与前方车辆的间隙或时间间隙。若系统检测到前方车辆并不在本车行驶道路上时将加快本车速度使之回到之前所设定的速度。检测车道是否偏离,如果偏离,可以通过控制转向来修正车辆的行驶路线。
ACC自适应巡航是最接近于自动驾驶的一项ADAS功能。但是目前市面上常见的ACC功能也存在着很多不足的方面。
第一是制动力度弱,当前车紧急制动,ACC设定最大减速度g值为0.35g(g是重力加速度,1g等于9.8m/s)明显小于正常刹车 0.8g以上,也就是说如果前方驾驶员突然急刹车,ACC自适应巡航存在追尾风险;
二,只依靠视觉感知的ACC的甄别能力可靠性不高,尤其是前方车辆,装载超长物体时,(测试过特斯拉MODEL S 90D ACC系统,当设定距离不变,前车是较大的泥头车,ACC功能完全失效)ACC能识别汽车,但是不能识别不规则货物,在复杂路况下,会严重影响安全跟车距离。
总结:
自2000年以来,中国每年造成人员伤亡的交通事故都超过200,000起,死亡人数均在60,000人以上,2010年我们的交通事故死亡率高达27.3%,是美国的21倍,日本的30倍…
面对这样的数据,一部分从事汽车研发的人士意识到,通过计算机视觉融合雷达等核心技术,开发出的ADAS(高级驾驶辅助系统)产品,可以大幅度的帮助车主降低事故风险、减少人身伤害和财产损失。目前国内ADAS技术于攻坚阶段,依靠视觉感知为主的ADAS公司和产品达到了80%以上,可量产视觉融合雷达感知的ADAS公司少;大部分功能的实用性并不高,尤其是涉及到车辆主动横向与纵向控制的ADAS功能任然是一大难题。等到产品真正完善,价格相对亲民,能用到咱老百姓车上的还需要不少时间



